

















更新机器人的猎豹,不需要视线,以便赶上
 Source:
Source:
<专家在麻省理工学院(MIT)教猎豹的机器人新的技巧。 现在,例如,机器人是能够爬上下楼梯,并得到周围的阻碍而不需要看到他们在他的面前有他们的照相机。 而这仅仅是一小部分项目都包含哪些内容的更新的模型。 3由于新的算法。
<<跨id="更295408">
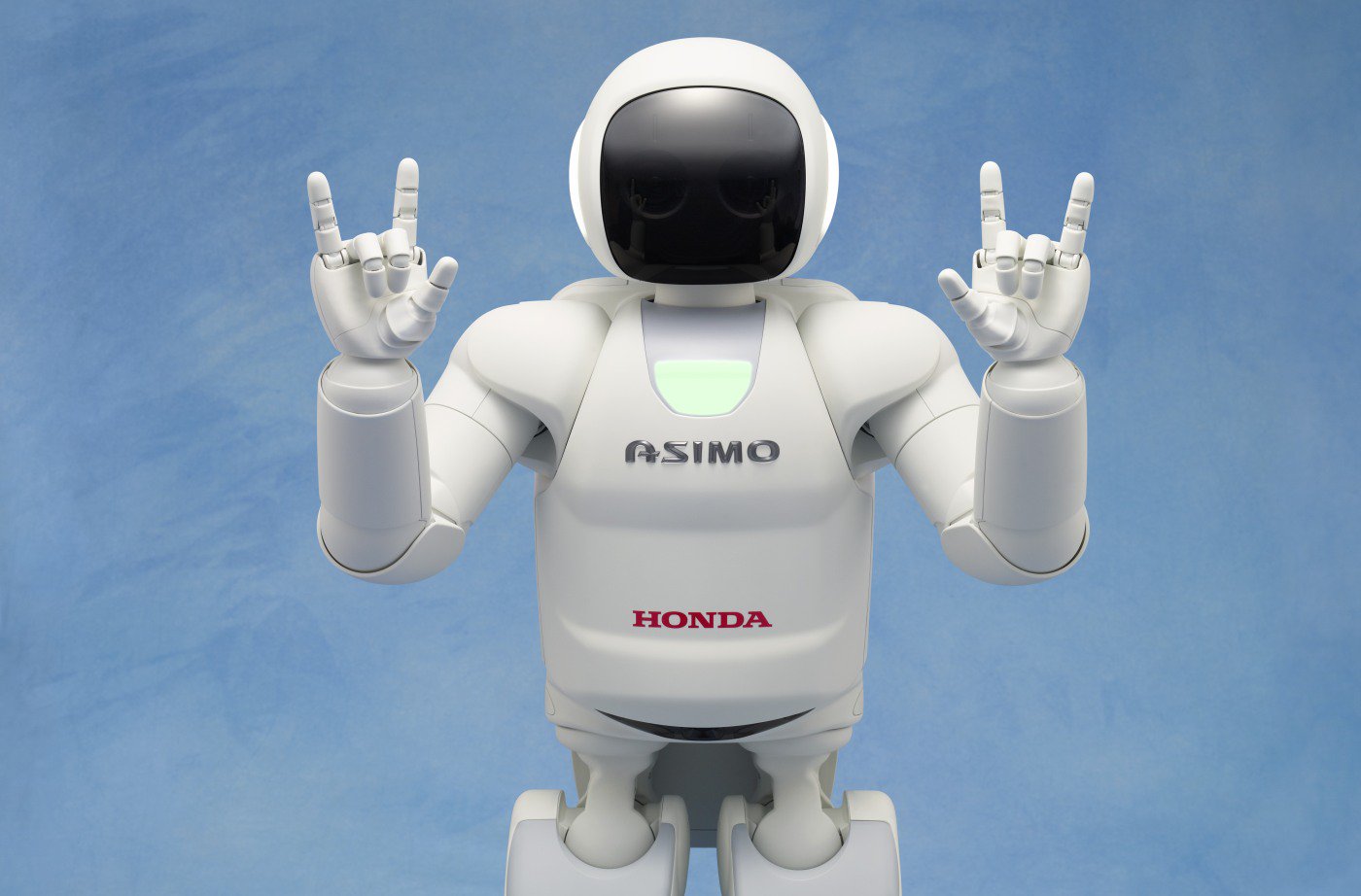
<机器人都能够爬上楼梯到我们当然不感到惊讶。 只要记住的一样的公司波士顿动力相同,或阿西莫,开发通过日本本田公司。 然而,他们所使用的摄像机的运动在地面上。 3. 开发商在又想要他们的机器人能够奠定之前,道路甚至没有看到什么是在他的面前。 如果你依赖的愿景,我觉得机器人技术、机器人可以被大大降低在实的条款。
<<面width="500"height="281"src="https://www.youtube.com/embed/QZ1DaQgg3lE?feature=oembed"架边界="0"允许="自动播放;加密媒体"allowfullscreen>
<大段引用><"如果有什么机器人将会在那里移动摄像机将是无用的? 在这种情况下,他应该怎么做? 这就是为什么我们给机器人的能力"盲运动"。 我们不想在很大程度上取决于他认为,"第8212;上述Sangbae金,教授在麻省理工学院机械工程,谁不发达的机器人。
<在未来的这个机器人可以用在那里你是不是能够工作。 例如,内心深处的一个核电站在那里可以用于检查的技术条件的对象。
<大段引用><"危险、肮脏和困难的工作会容易得多的时候使用远程遥控的机器人",与#8212;上述金。
<然而,机器人是不是总是能看到它的环境。 例如,为机器人的工程师试图帮助的机器人探索内部的环境的反应日本核电厂福岛面临的新出现的问题因过高辐射水平的摄像机。 为什么有摄像头在这些条件。
<这就是为什么机器人从麻省理工学院的决定使用猎豹3个新的传感器和算法,给了他的"感觉"本体(意义上的自己的位置在周围空间)。 此外,受影响和机制负责灵活性的机器人。 他还收到了更新预测算法。 3改变他的步态,以避免下降或失去平衡,在特定情况下。
<更新后的模型能够摇摆和旋转位。
<了楼梯。
<虽然并不总是成功的。
<最令人印象深刻的新功能的机器能力的即时"逆转"由于改变方向的膝盖关节。
<一次机器人学会了乘坐。
<和增加稳定性。
<记得,早期版本的机器人猎豹设置一个运行速度记录,并且可以跳跃过障碍达到高度为60厘米。
建议
焦虑时,不是所有的作品,因为它应该,而是一个完全彻底改变,往往仍然仅是个人的道德准则,其中,像一个罗盘指示的方式。 但是什么引起的道德价值对一个人? 社会、亲人温暖、爱#8212;它是所有基于人类经验。 当你无法充分经验现实世界中,许多获得经验的书。 重温故事之后的故事,我们采取自己的内部框架,其中我们遵循多年。 在此基础上系统,研究人员决定进行一项实验,并灌输道德价值观的机,看看如果机器人可以区分善恶,阅读书籍和宗教的小册子。 的人工智能是创建不仅是为了简化程序的任务,而且要执行重要的和危险...
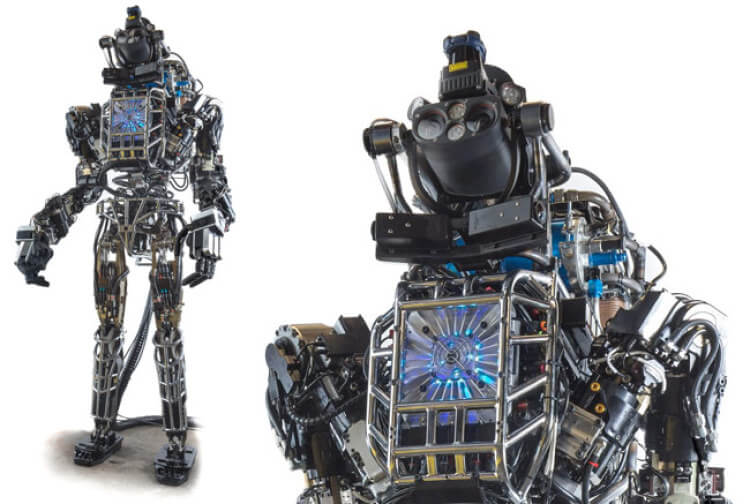
现在,当它涉及到机器人,看来没有人们想象镜头从"终结者"。 学会了使用机器人的良好社会,现在根据这一定义,躲不仅人形机器,也是那些仅仅能够实现自动化的一个进程或另一个。 巨大的工业机器人正在用于采矿企业、工厂、车会和家用电器,以及小其对应方定居在某些房子里。 但有最先进的机器人在地球上? 如果是这样,它看起来如何和工作的? 如何创造最为复杂的机器人 这个机器人是创造了近7年前,它是不断发展,到目前为止,还没有一个已经成功地超越. 机构为国防部高级研究项目,美国(国防部研究计划局)共同开发了人形...
最近的伊隆麝香透露的秘密千年的摄像头上后视镜的车特拉斯模式3. 虽然主要目的的任何摄像机拍摄周围发生的事情,发现了一些细节。 因此,该相机将按照车辆的时刻,当它的工作原理在自动驾驶仪或租金,直到所需的主(麝香认为,这将是«排斥»的部分费用在购买车)。 其他的相机的功能:识别驱动程序(如果有多个)和自动调整的所有系统,以一个特定的人。 从座位和镜子所构成的气候系统。 特斯拉的发展是跨越式发展,被广泛使用的道路和汽车本身是能够跟停车场附近。 这是一个现实,我们阅读小说,一些5-1...
相关消息








...

...



评论意见 (0)
这篇文章已经没有意见,是第一个!