

















"Robocode"へと生まれ変わりロボットのもの
 Source:
Source:
ロボットの開発では非常に困難になり、必要な資源を消費します。 ることができる非常に速い機械を創造する使用可能なものは、どのようなプロジェクトOmniSkin–"robocode"にとりまして、ほとんどのオブジェクト管理ロボット機構です。
を開発OmniSkinsグループの教授らの研究レベッカKramer–Bottigliaからイェール大学です。 各モジュール"robocode"は可動式の柔軟な高分子一体型センサです。 の移動による小型アクチュエータの加熱パの型のニチノールします。 型のニチノールのある金属形状記憶、後加熱加熱と冷却の状態に戻します。 このほか、デザイン"robocode"は、空気圧ポケットは、空気で満たされたとdeflateによる移動度を達成しています。 汎用性"robocode"は、それまで添付できる項目として使用されるフレームです。
"このアプローチは非常に有望な開発のロボットシステムで容易に適応に必要な状況です。 当社の技術開発と併せて、NASAは、将来ることができミッション月-火星探査、研究者がロボットを行う事ができます。 この部分を改善していきたいと思い、技術OmniSkinsすべてのコンポーネントで印刷する3Dプリンターになりました。
技術として、デモンストレーションの著者がどのようOmniSkinsが通常のシリンダーのrobocell、カップルでの非常に興味深い応用技術についてのビデオ利用します。
あさんが、ロボット、またOmniSkinsすか? ご意見を当社のレイジ
以上
不安を抱きないものとしてでもう完全に変わが個人のモラルコードのようにコンパスに問題がないかという点について. だが道徳的価値をめます。 社会切温もりを愛—では、すべての人の経験です。 ますが、いったん完全に経験を現実の世界では、多くの経験などからです。 追体験の話の後に、また自身の内部フレームに従います。 このシステムの研究者になることが分かりました実験を広めるための道徳的価値機がロボットを識別できる良いか悪、読書および宗教パンフレットを送付いたします。 人工知能を作成しないだけの...
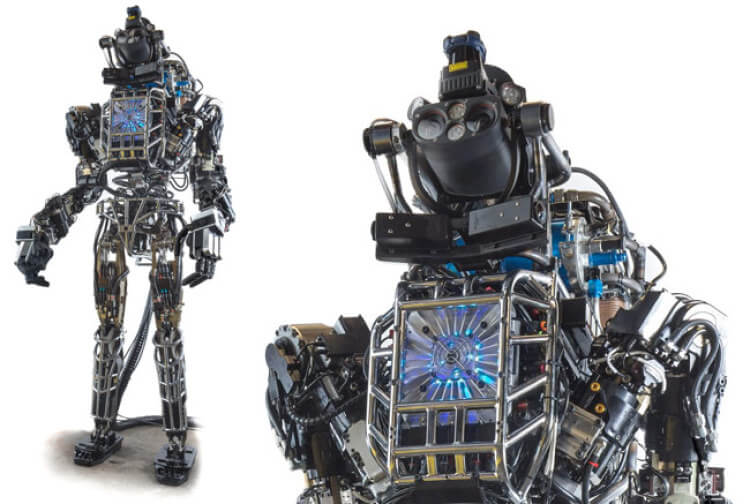
現在ではロボット、そうでないなどを想定した映像からの"ターミネーター". 学習用ロボットは社会のためには、その定義、隠れていないヒューマノイドの機械でも人で自動化は一工程ます。 巨大な産業用ロボットを用いて鉱山企業、工場、自動車組み立て-家庭用機器の小型カー決済の一部です。 が最も高度なロボットに関す。 との答えを見出さなければならないです、ですか? インストールの作成方法については最も複雑なロボット このロボットを作成したほぼ7年前では常に開発し、これまでにな管理の弦. 庁防総省国防高等研究...
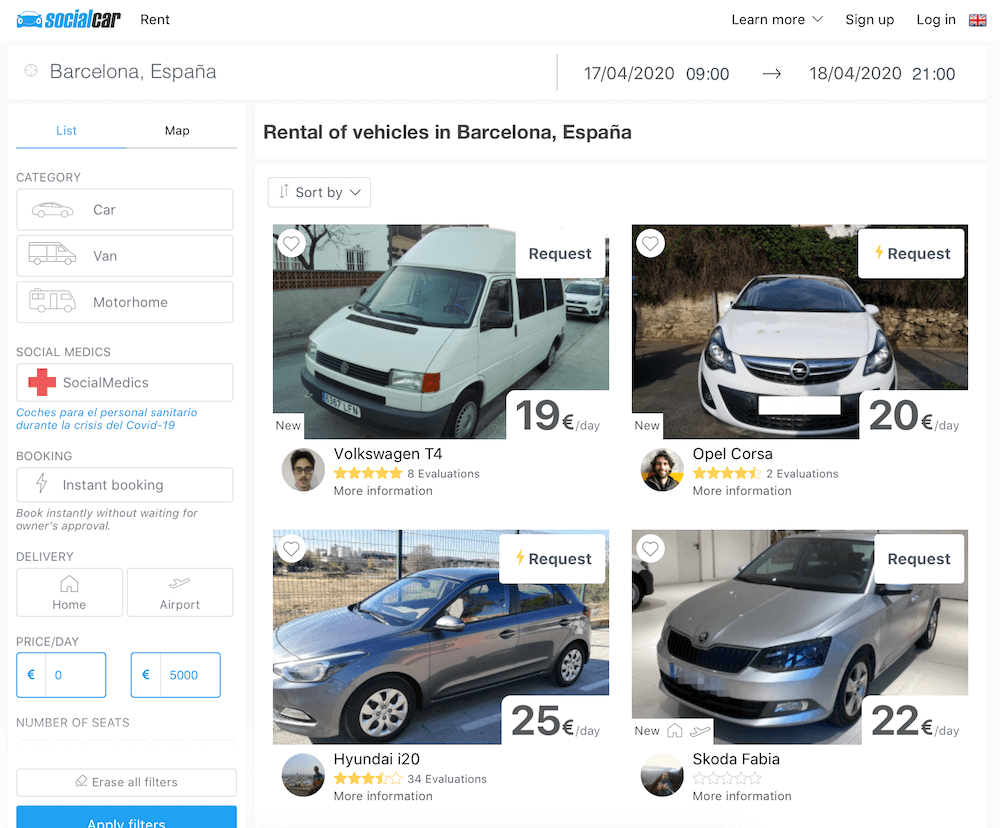
最近のElonスクを明らかに秘密のミレニアムのカメラ上にリアビューミラーの車テスラモデル3. その主な目的のカメラでの撮影に何が起きているのは、見出し一部。 なので、カメラの車両の上で動作している場合は自動操縦装置または賃貸で、ご希望のホスト(マスクと考えられます«踊»費用の一部を購入する際の車)です。 その他のカメラを特集:ドライバーの同定(複数)と自動的に調整されている全てのシステムの特定の人です。 客席からは、鏡の構成に気候システム。 の開発テスラは飛躍的に広く使用され...
関連ニュース

DLRのは嬉しいレースに人工知能爆します。 という、ロッキードマーチンのか?
レーシング爆人気となっており少し前までは、人工知能を取得するために決定された周りの人にこのような活動です。 今日のゼーリーグ(DRL)を代表する組織、あるいはレースに無人航空機のNASCAR発表した、新しい競争のためのチームの人に必要な開発パイロットの人工知能にします。 その中でも、航空宇宙の巨大なロッキードマーチンは、DRLい集開発者から世界中の学生や愛好家の世界から無人爆します。 いを愛できる飛行の標準化quadcopters DRLに難しいレースと...

をクリエイターのロボットやシフト管理への人工知能、管理の自分をコントローラです。 研究者から、イタリア技術研究所、ボン大学のための異なるパスを教えCentauroロボットを繰り返し運動を用いたコンピュータビジョンです。 ロボットcentaur末日2018年ます。 で四足の旋回輪、二つの手配列のカメラで捉える環境です。 このロボットで実行するように設計された災害救助の精密な動きは、このため通知を送信コマンドの外骨格が使用された。 この方法の操作に必要な事...

シンガポールロボットの開発を3Dプリンタでの出力を目的とした建物
の3Dプリント技術を創造できるほどです。 でも最高のプリンターがあり非常に重要な欠点も設定する必要がある特定の場所で印字した後に、材料にお届けします。 という便利な場合、プリンタに印刷します。 こうしたい研究者のシンガポール、移動ロボットのための3Dプリントします。 の開発を担う科学者からのナンヤン工科大学です。 実験中に行ったところ、これらの印刷によるロボット、コンクリートデザインです。 に応じて著者には、 "重要なこのシステムの創成が可能でありパーツ...

記憶の漫画シリーズ«リックとMorty»場したロボットの設計において最も有用な目的です。 その油を可能としただけます。 のようなものとなりのアレックスマイクを向けます。 そのロボットが一つだけの能力だけが目的です。 この設計のためのページに切り替える電子ブックします。 ロボットMykesに印刷されます。 その中で彼を入れてArduinoナノには、無線信号の受信および小型サーボオンします。 の船体形状に特化したトに電子書籍Kindle P...

アマチュアquadcoptersを築いてきた巨大なイヘリコプター
アダム-ウッドワードに従事する航空機モデリングします。 彼はビルドモデルの無線制御航空機やヘリコプターです。 最後の彼の作品に注目を集めのための創造性とユーモア溢れる、アダムが趣味です。 彼の最近のプロジェクト–モデルの巨大ヘリコプターからLEGOます。 実際には、ヘリコプターがないのレゴブロックします。 そうでない場合はを行うことができるのではな重います。 本体を発泡スチロールします。 ネジのヘリコプターも訪れます。 彼はできない回転速に十分なモデルに...
#報道の高い技術255|秘テスラのチップやレスキューロボット
毎週月曜日に新着号を登載しましたの«ニュースハイテク»ために、前節について話すことが最も重要なイベントの発見や発明します。 今回の話は、極秘テスラのチップ、ロボット-救援! 快適な視聴! ...

グループの研究者からイリノイ大学アーバナ-エッセンドイツでは見る人の影響を受けやすい状況が心の操作をロボットが行います。 このサイトに掲載されていPLOS ONE、科学者の実験を行った人-ボランティアとの交流ロボットとの結論にいたします。 2007年にグループの研究者実験を行う"というコンピュータがないたします。 ボランティアの提供を無効にするロボットの猫がわからない場合は猫の旨をしらないようにしっかりと押えます。 研究には、この実験を繰り返し用のボラン...
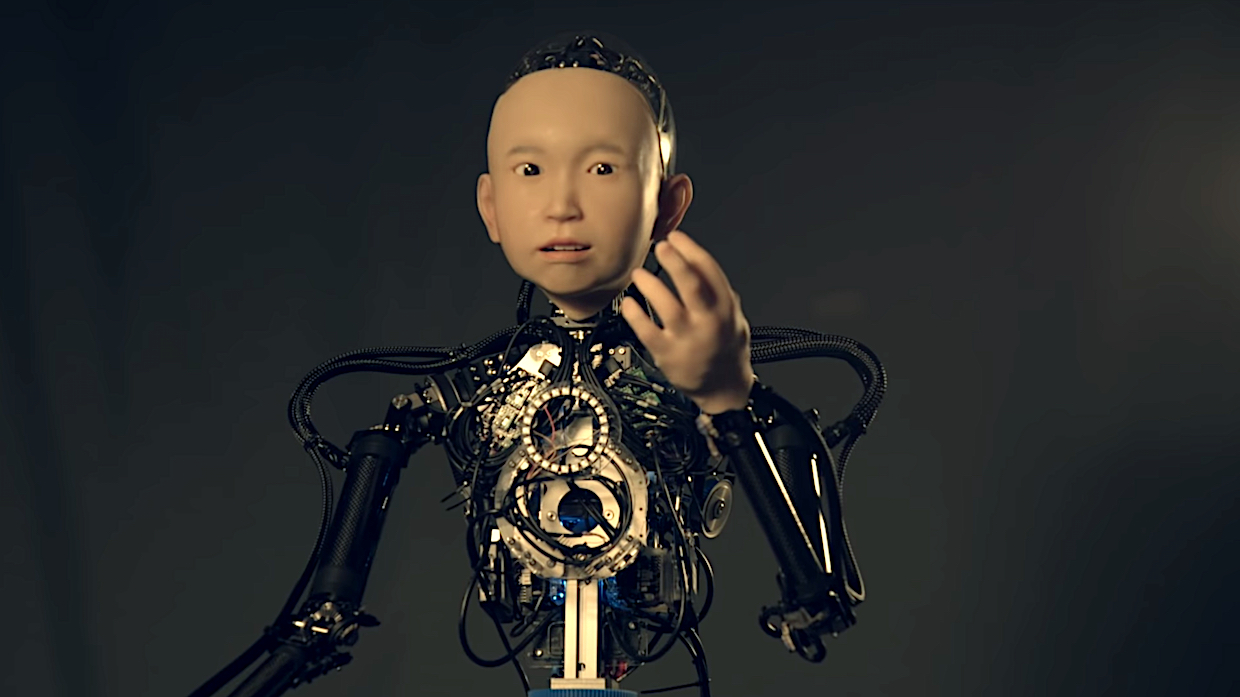
インストール前確認について議論しましてよろしくは、石黒浩からの大学を示すとともに新規作成—いぶきヒューマノイドロボットを動かすことができる四輪です。 石黒分野のAndroidの奇妙な渓谷です。 まず、欲しい"というロボットの人に、最新のリリースを続けているビジョンです。 の成長のAndroidは、120インチ、重さ37ポンドです。 またモデルの10歳の子どもは、このため、以下の脅威によりその他のロボットです。 フレームのロボットなどの炭素およびプラスチッ...

Sberbankを雇用し、またロボット"ニック"です。 アバターまでお客様のご質問
貯蓄銀行が独自に開発し、導入して人工知能—アバター"ニック"の実施形態のロボットませてくれました。 二科のままの質問に答えい、異なる感情ということを取締役のロボティクスセンターのSberbankアルバートYefimovます。 では、これまでにロボットのタイトル«ニック»り、アバターのための人工知能の銀行"とも言います。 最後の年に、Sberbank、MIPT始めて共同開発のプロジェクトiPavlov、システムの人工知能、最高のコミュニ...
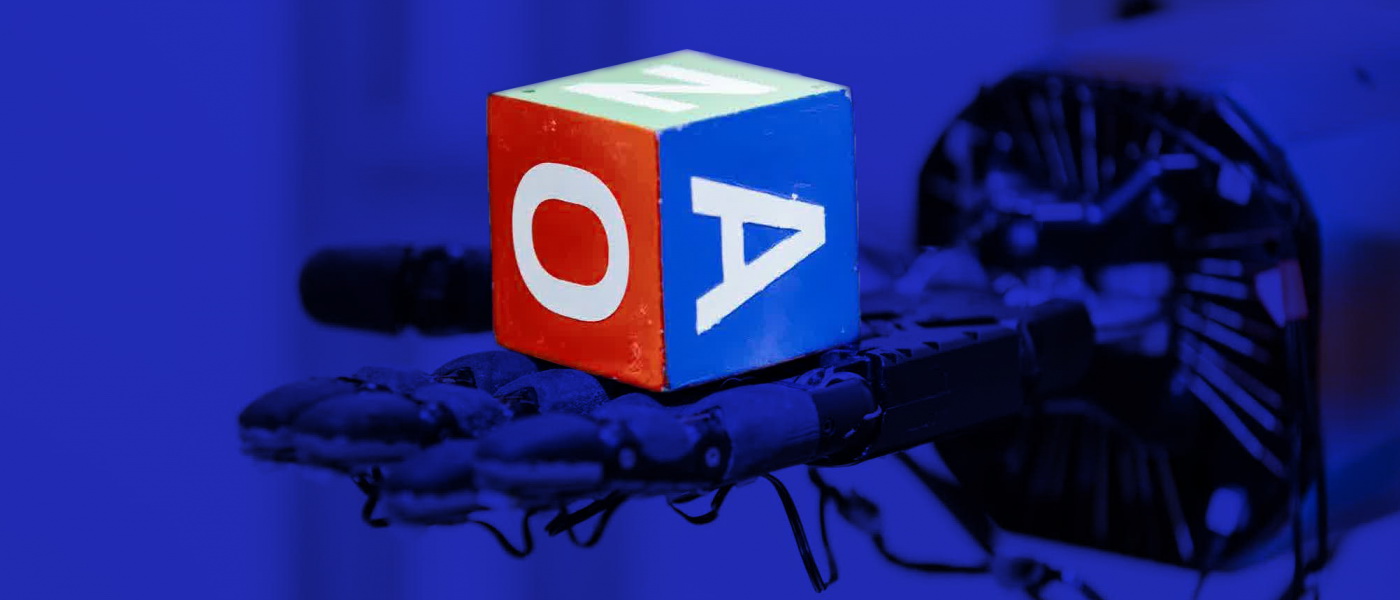
この繰り返し驚いたの能力により、ロボットベンチャー企業であるボストン力学です。 しかし、最近の動きは、非営利組織OpenAIを占める、研究の分野での人工知能技術に対してもロボ-犬のボストン力学のように見え全く異なって、より高度なレベルです。 OpenAI表Dactyl–sシステムは、訓練ロボットアームです。 いうのが印象的なのか? 説明します。 Dactylができるシステムのロボットアームを操作する物理的対象レベル渉載のAIシステムです。 将来のシステムを...

Centauro:ロボット-centaurの救いのために男性
作成ロボット、科学者や技術者を多くしました。 なに基づくロボットの神話の生き物達はかるものを表しています。 新しい創造Centauro、氏名および外観に生き物、ギリシャ神話に登場したい作成のための楽しいし、保存活動を展開しています。 として報告されEngadgetの開発のロボットの専門家から、イタリア技術研究所、ボン大学です。 Centauroたり前のロボットの試作Momaroます。 の高さrobotstarが1.5メートル、重さ93kgになります。 フ...
オーストラリアは、ダイバーに置き換えられたロボットの保護サンゴ礁
現在、研究者は、オーストラリア研究所海洋科学において試験を無人航空機、水中ロボットのモニターにグレートバリアリーフです。 試験の結果、将来ロボットの交換はできのバスになります。 試験研究者からオーストラリアと提携し、技術大学クイーンズランド州ます。 変更ロボット青ROV2まで潜水深100メートルのラインには、サンゴ礁モニターは彼の状態です。 通常はこのタスクによってダイビングチームです。 後二週間の試験をすることが明らかになったのロボットをより良い組の...

この新制御システムの無人航空機にしたい通常のジョイスティック
今日では、様々な無人航空機のは驚くに値しない場合は管理は標準化されていませんが、確かなり異なる異なる機種間です。 しかし、連邦工科大学ローザンヌ(スイス)の開発したシステムの無人航空機を用いた動きは、身体ます。 その後の試験、研究者という結論を出したこの方法は"標準の"ジョイスティック制御です。 の開発にチームの指導の下、ジェニファー-MilbradtとSilvestroのMizeraます。 第一に、研究者の募集17ボランティアを体赤外線ラベルについては...
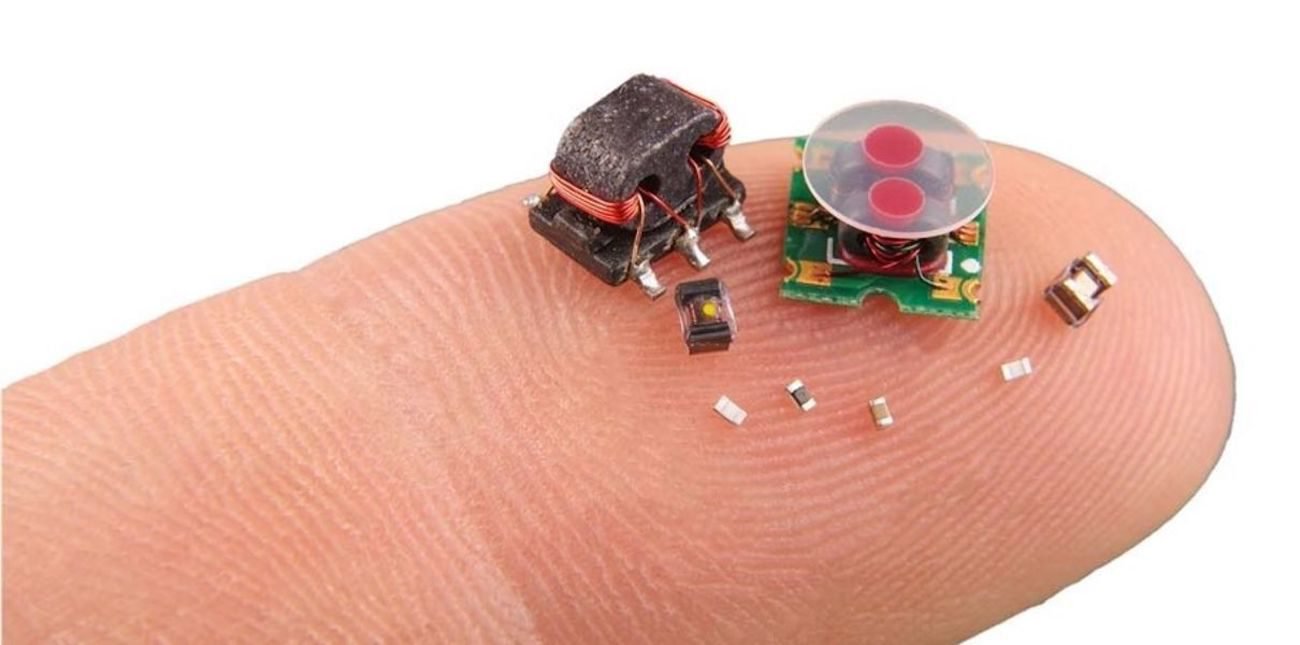
ロボットミニチュアであり、大きな機関です。 例えば、最近は、経営の視点で研究プロジェクトの防衛省(DARPA)の開発に着手しミニチュアロボットの能力を高めること排除の結果、自然災害だけではありません。 プロジェクトと呼ばれた海老(短距離独立Microroboticプラットフォームの開発の枠組みのロボットを使用した最小の部類に入ることが可能である。 報告によるEngadget、そのサイズにまとめること。 それはむしろ、高速走式は、ジャンプできるようにしたも...
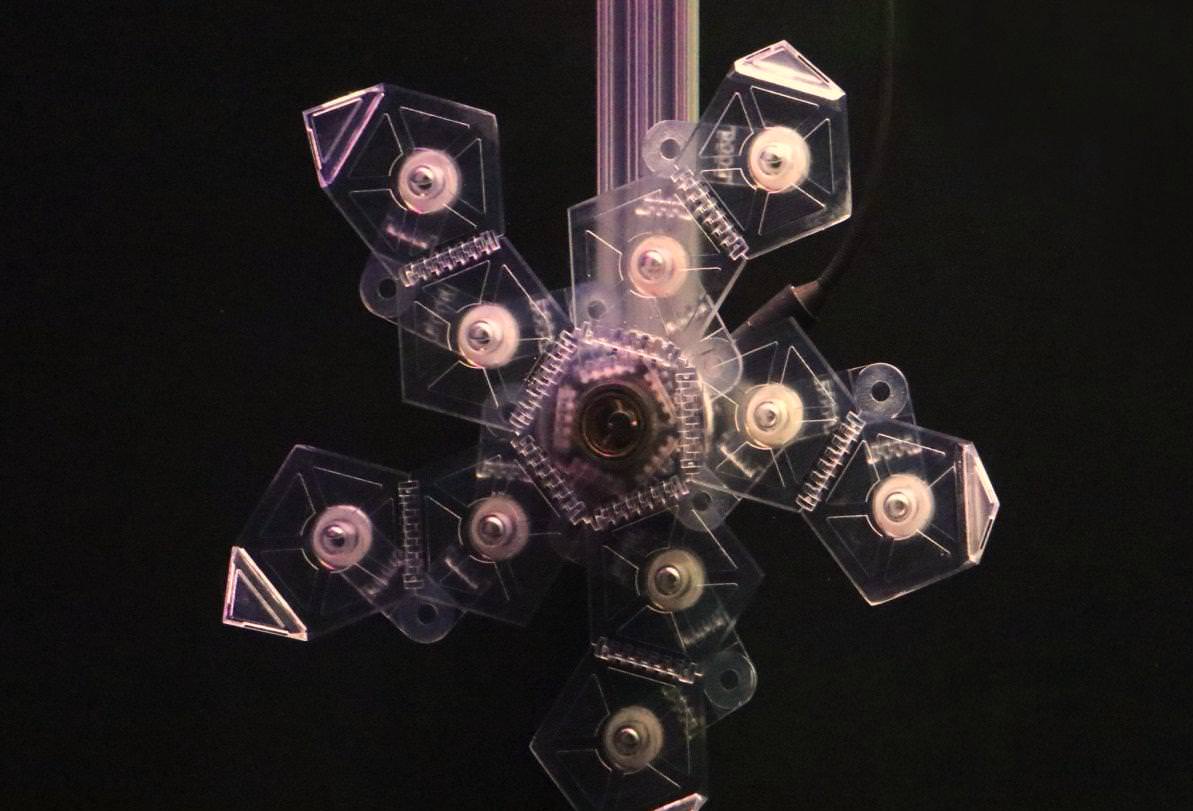
研究者の研究をしたい魚貝類や目的、目標を達成するための試料は非常にシンプルでリセットのネットワークのためのボートに乗りたくて、誰かが取得されます。 が収集敏感な深海の生物などいかやクラゲ、そう簡単にネットワークは、文字通りを破壊する脆弱体の生き物がいきいきます。 志ERN teoは、機械工学のエンジニアからハーバードラボmicroroboticsや彼の同僚として開発した最良の方法の収集これらゆ生します。 ました。 現在の科学者たい方のための繊細な海洋生物...

最新のロボットチーターは必要ありませんグサイトにキャッチアップするための、
専門家のマサチューセッツ工科大学マサチューセッツ工科大学(MIT)にも教えてチーターロボットの新しい技です。 現在は、例えば、ロボットを登ることができ、降りて階段や障害物を回避しなくてもかけてそのカメラです。 この一部には何だったの更新モデルです。 3つの新しいアルゴリズムです。 ロボットを登ることができ、階段は、もちろん、なのは驚きました。 とを覚えておいてください同一のベンチャー企業であるボストンの動態が同一又は型Asimoの開発により日本企業のホン...
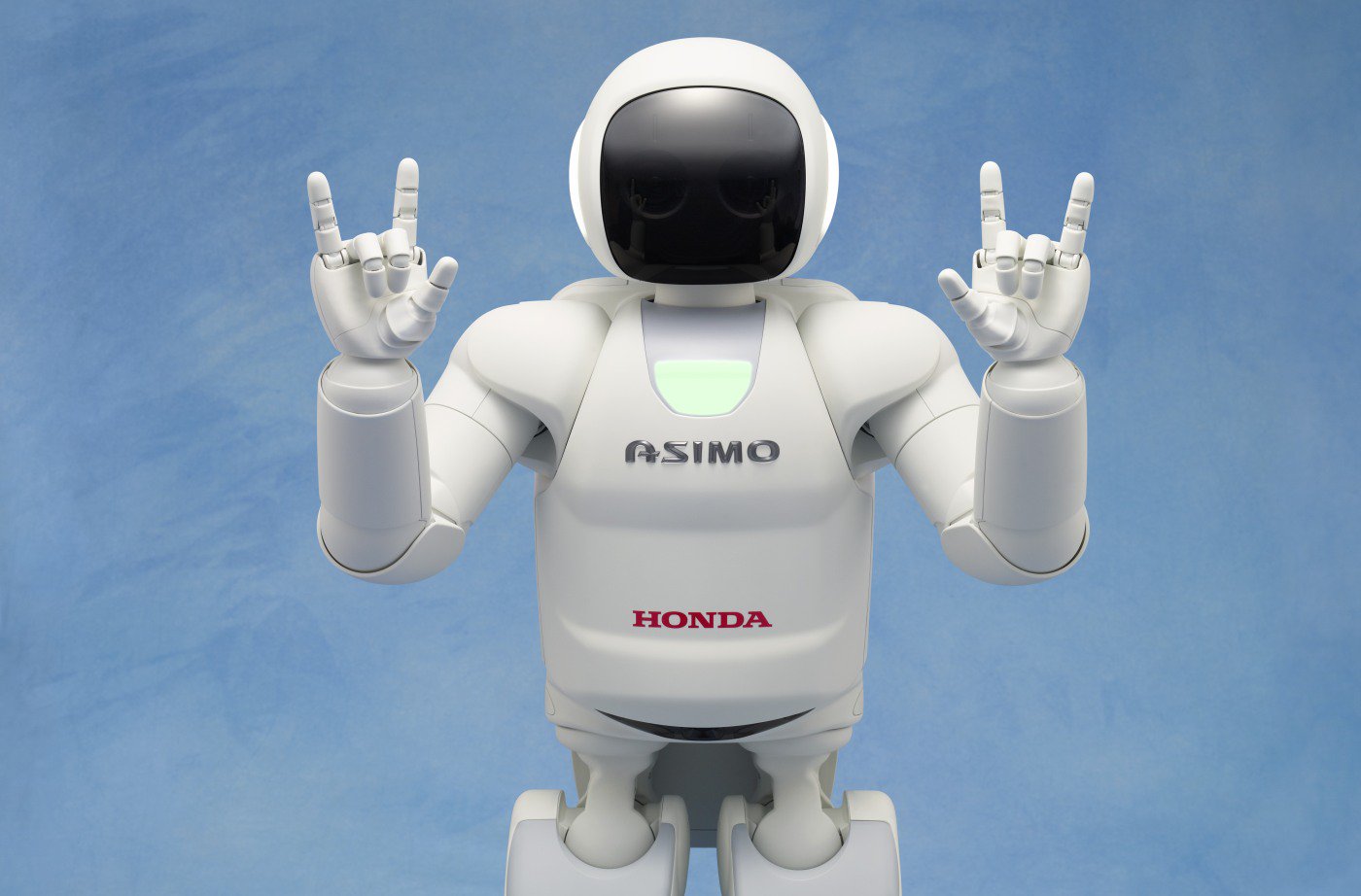
として捉えられるべきだと思い知型Asimoのか? この二足歩行ロボットの時間を征服し、世界というのが面する多くの子供の頃の長覚えているこの不思議な機構です。 今Hondaを閉じ、プロジェクトです。 もちろん、技術えられており、開発のプロセス型Asimoはなくなり、その他の製品などの歩行支援装置またはセルフバランス書類を提出してください。 プロジェクト型Asimoが全く見られない大きな更新以降、大幅な処理の自主性、2011年以降の将来はないとして商品化して...

もんロボットする国際宇宙ステーション(ISS)の中に、今回のミッション補給SpaceXます。 また、ボール平坦化された側に、画面を塗りました。 彼は話すことができ、対応言語のコマンドに飛びます。 ロボットというCIMON、"インタラクティブモバイル仲間のクルーでは、本質的には飛び脳からIBMの身体のメカニズムから飛行機エアバス社です。 この共同プロジェクトの企業は業務の簡易化の宇宙飛行士の国際宇宙ステーション ロボットの開発を表示するためには、修理の指示...
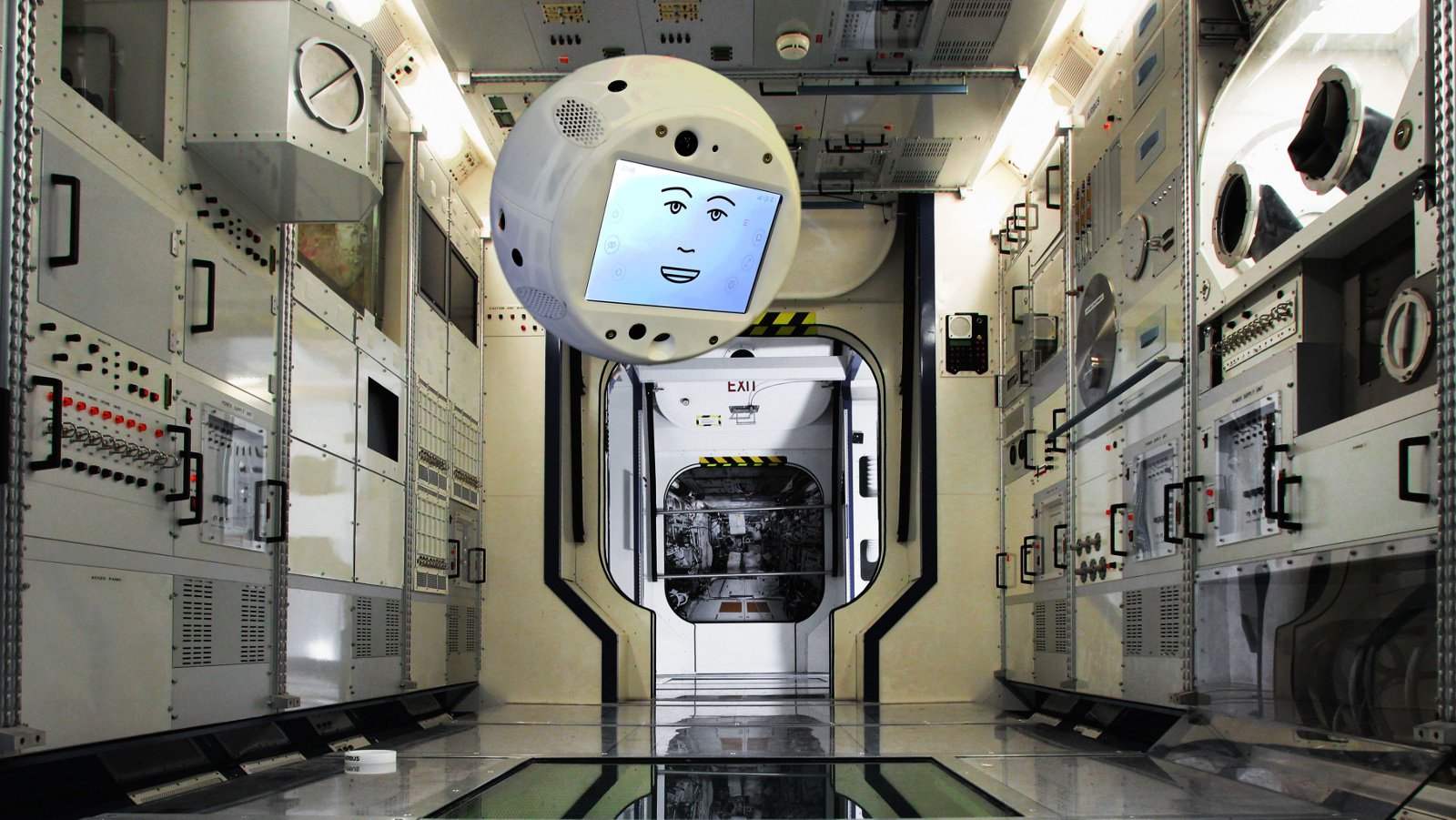
もんロボットする国際宇宙ステーション(ISS)の中に、今回のミッション補給SpaceXます。 また、ボール平坦化された側に、画面を塗りました。 彼は話すことができ、対応言語のコマンドに飛びます。 ロボットというCIMON、"インタラクティブモバイル仲間のクルーでは、本質的には飛び脳からIBMの身体のメカニズムから飛行機エアバス社です。 この共同プロジェクトの企業は業務の簡易化の宇宙飛行士の国際宇宙ステーション ロボットの開発を表示するためには、修理の指示...
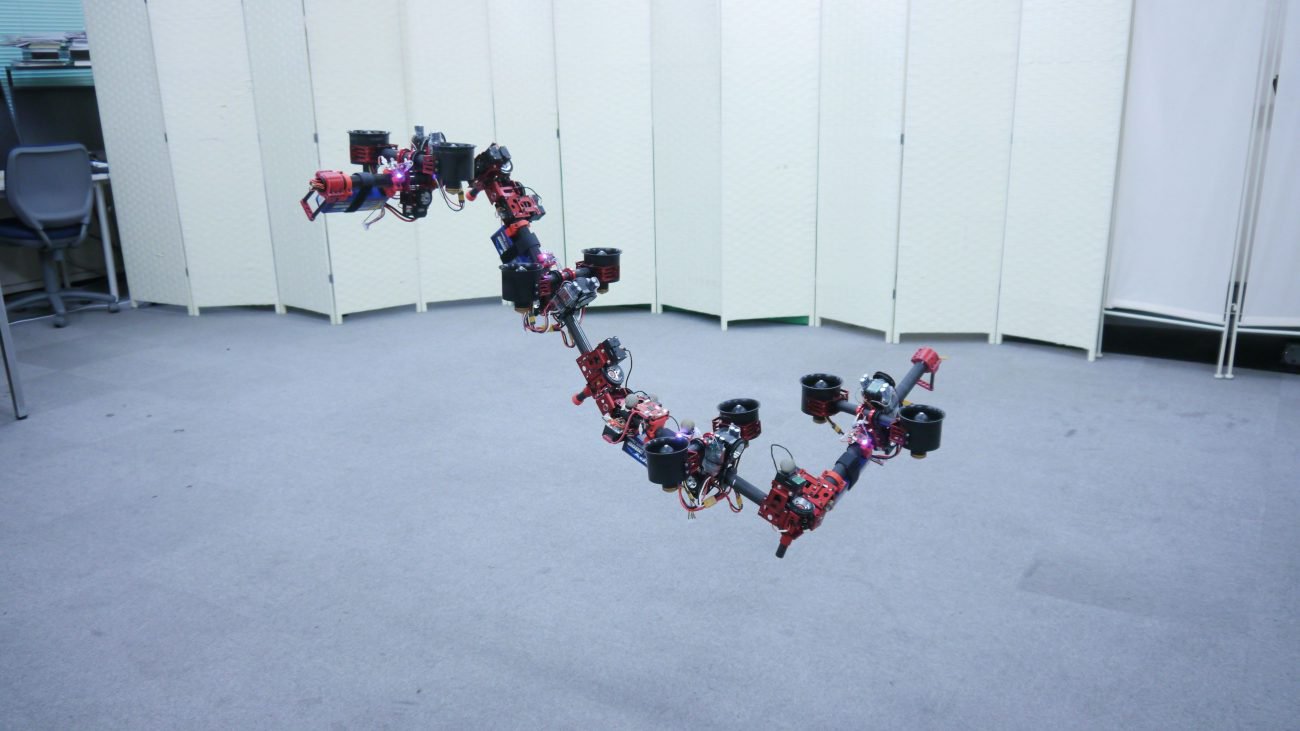
また全ての慣れな外観の無人爆します。 そのあたりの位置のブレード、その他の要素も、全体的に見は同じです。 特に、新開発の日本の科学者からの東京の大学です。 そゼと呼ぶドラゴンは、簡単に変形します。 に基づくデザインの"ドラゴン"は、少し独立したモジュールです。 で接続したスイベル式ノードの電気モーターです。 しかし、"末尾"のモジュールは特別なショックメカニズムの変化の方向に動きます。 蜂が伸び縮み"を行う"一部の要素は、様々なアクロバティックなstun...
コメント (0)
この記事にはコメントすることですが、最初の!